linux
数据结构
后端
源码
动态规划
钉钉
husky
CET-4
cloud alibaba
课程设计
xshell
双目相机
论文选题
热成像仪
esp8266wifi
skill
魔百盒刷机
医院运营
股票交易
misc-1
3D重建
2024/4/12 12:24:55
姿态估计0-01:DenseFusion(6D姿态估计)-资源下载(前奏准备)
以下链接是个人关于DenseFusion(6D姿态估计) 所有见解,如有错误欢迎大家指出,我会第一时间纠正。有兴趣的朋友可以加微信:17575010159 相互讨论技术。若是帮助到了你什么,一定要记得点赞!因为这是对我最大的鼓励。文末…

【论文简述】Global Contextual Complementary Network for Multi-View Stereo(BMVC 2022)
一、论文简述
1. 第一作者:Yongrong Cao
2. 发表年份:2022
3. 发表期刊:BMVC CCF-C类
4. 关键词:MVS、3D重建、上下文、自注意力、全局信息
5. 探索动机:CNN的局限性,缺少全局上下文通常会导致无纹理或…
姿态估计0-05:DenseFusion(6D姿态估计)-源码解析(1)-训练代码初探,框架了解
以下链接是个人关于DenseFusion(6D姿态估计) 所有见解,如有错误欢迎大家指出,我会第一时间纠正。有兴趣的朋友可以加微信:17575010159 相互讨论技术。若是帮助到了你什么,一定要记得点赞!因为这是对我最大的鼓励。文末…
姿态估计0-02:DenseFusion(6D姿态估计)-源码训练测试,报错解决
以下链接是个人关于DenseFusion(6D姿态估计) 所有见解,如有错误欢迎大家指出,我会第一时间纠正。有兴趣的朋友可以加微信:17575010159 相互讨论技术。若是帮助到了你什么,一定要记得点赞!因为这是对我最大的鼓励。文末…

机器学习笔记 - 神经辐射场(NeRF)的简要概述
一、简述 神经辐射场十分重要。在表示和渲染 3D 场景领域,神经辐射场 (NeRF) 在准确性方面取得了巨大突破。 给定底层场景的多个图像,NeRF 可以从任意视点重建该场景的高分辨率、2D 渲染图。与局部光场融合 (LLFF) 和场景表示网络 (SRN) 等现有技术相比,NeRF 更能够捕获场景…
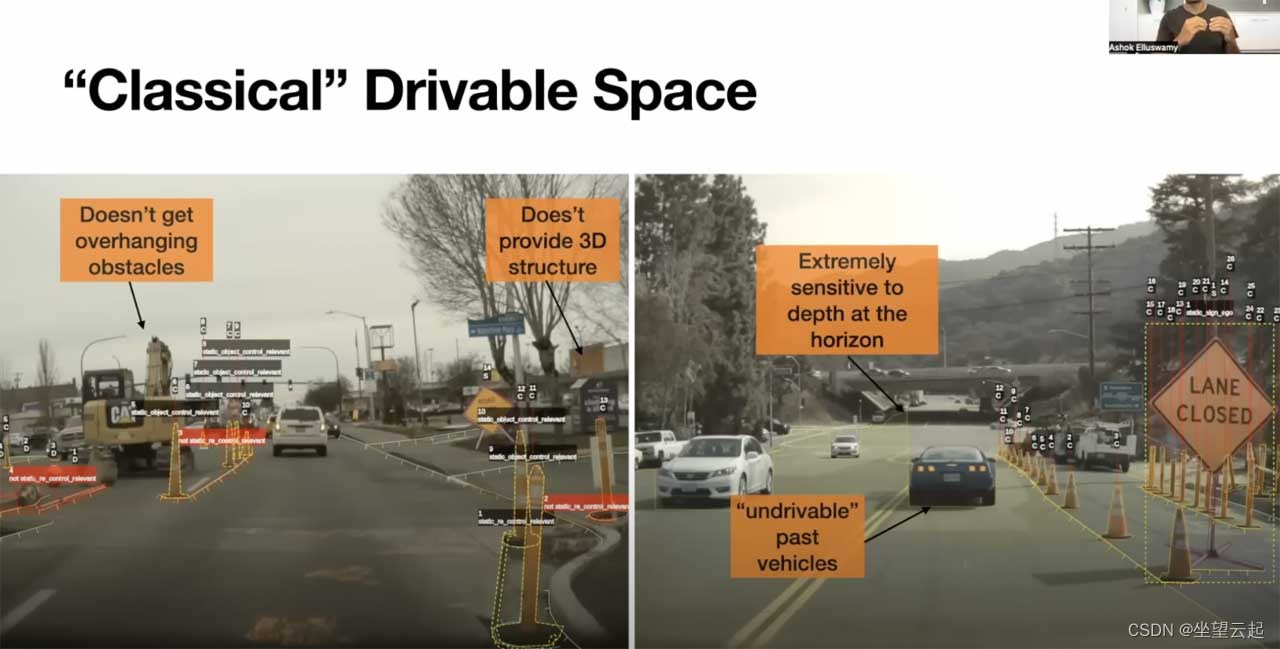
机器学习笔记 - 特斯拉的占用网络简述
一、简述
2022 年,特斯拉宣布即将在其车辆中发布全新算法。该算法被称为occupancy networks,它应该是对Tesla 的HydraNet 的改进。 自动驾驶汽车行业在技术上分为两类:基于视觉的系统和基于激光雷达的系统。后者使用激光传感器来确定物体的存在和距离,而视觉系统…
计算机视觉 - 3D计算机视觉相关基本概念
一、简述 计算机视觉是一个跨学科的科学领域,研究计算机如何从数字图像或视频中获得高级理解。计算机视觉的主要目标是将光转换为有意义的信息(几何、语义等……) 3D 计算机视觉是计算机科学的一个领域,专注于三维视觉数据的分析、解释和理解。它涉及从二维图像或视频中提取…

【论文简述】Multi-View Stereo Representation Revisit: Region-Aware MVSNet(CVPR 2023)
一、论文简述
1. 第一作者:Yisu Zhang
2. 发表年份:2023
3. 发表期刊:CVPR
4. 关键词:MVS、3D重建、符号距离场
5. 探索动机:像素深度估计仍存在两个棘手的缺陷。一是无纹理区域的估计置信度较低。二是物体边界附…

三维医学图像处理系统(PACS)源码
三维医学图像处理系统(PACS)源码
系统概述:
它集影像存储服务器、影像诊断工作站及RIS报告系统于一身,主要有图像处理模块、影像数据管理模块、RIS报告模块、光盘存档模块、DICOM通讯模块、胶片打印输出等模块组成, 具有完善的影…
3D重建中的可视外壳(visual hull)
目前,人们主要通过三种方式来获取三维模型:
利用传统几何造型技术直接构造模型利用三维扫描设备对真实物体进行扫描,进而重建出模型利用从各个视角拍摄的真实物体的多幅图像重建模型
由图像重建三维模型技术又可分为两类:一类是通…

【论文简述】WT-MVSNet: Window-based Transformers forMulti-view Stereo(arxiv 2023)
一、论文简述
1. 第一作者:Jinli Liao、Yikang Ding
2. 发表年份:2023
3. 发表期刊:arxiv
4. 关键词:MVS、3D重建、Transformer、极线、几何约束
5. 探索动机:然而,在没有极几何约束的情况下匹配参考图…

NeRF——基于神经辐射场的三维场景重建和理解
概述
三维重建是一种将物理世界中的实体转换为数字模型的计算机技术。其基本概念是通过对物理世界中的物体或场景进行扫描或拍摄,并使用计算机算法将其转换为三维数字模型。抽象意义上的三维模型指的是:形状和外观的组合,并且可以渲染成不同…

【论文简述】IS-MVSNet:Importance Sampling-based MVSNet(ECCV 2022)
一、论文简述
1. 第一作者:Likang Wang
2. 发表年份:2022
3. 发表期刊:ECCV
4. 关键词:MVS、3D重建、重要性采样、无监督误差分布估计
5. 探索动机:以粗到细的方式预测深度图,部分缓解了对于分辨率的限…
姿态估计0-07:DenseFusion(6D姿态估计)-源码解析(3)-PoseNet姿态估算网络详解
以下链接是个人关于DenseFusion(6D姿态估计) 所有见解,如有错误欢迎大家指出,我会第一时间纠正。有兴趣的朋友可以加微信:a944284742相互讨论技术。若是帮助到了你什么,一定要记得点赞!因为这是对我最大的鼓励。文末附…